Project: Geodesic Dome Knots

Click to see gallery of full-sized images…
Introduction
As I was working on my PlotEquation plugin, I got much of my inspiration from Paul Nylander’s website and used his work as an indicator of how much I still have yet to learn. His geodesic dome knots particularly caught my attention, but back when I first started programming I couldn’t comprehend how such objects could be conveniently modeled. Fortunately, when I started learning about using subdivided icosahedrons to geometrically approximate a sphere for my Riemann Sphere visualizations, it finally clicked how he was able to model such objects: he simply designed a single face, and copied that design to the others. This approach was not appealing to me, however, given the need for manually designing a face: I wanted to automote the process, so that it could work on other similar polyhedrons. Thus this project was born, with the result being an OpenGL project that allows the user to change various parameters and export the model as a .obj file.
Features
This project uses an adjacency-mapped and subdivided chamfered dodecahedron as the base polyhedron, with the ability to model each of Nylander’s three designs. With each one, the user is able to specify the polyhedron’s size and number of subdivisions, as well as specify the Z-offset (how much to offset the curve to turn it into a wave). Specialized parameters for each design is shown below:
Geodesic Rings
• Sharpness (how circular it is)
• Rotation angle
• Scale
Geodesic Weave
• Rotation angle
• (WIP)
Geodesic Braid
• (WIP; no other parameters)
Gallery
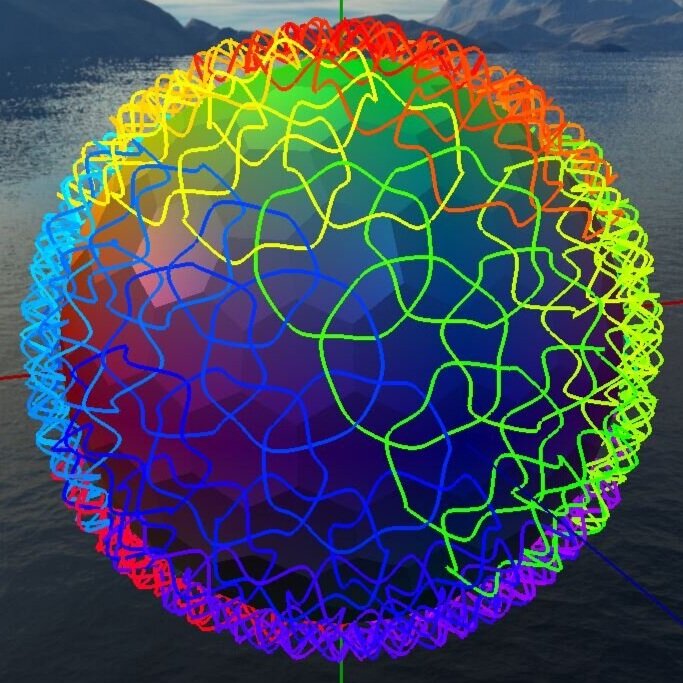
Unless otherwise specified, each of the base polyhedrons for the following designs is subdivided twice, its diameter 1, and the Z-offset for the curves is 0.035.
Note that an additional sphere is rendered in the middle in order to make the visuals more clear.

Changing the angle for the Rings design

Rings; Sharpness: 1, Angle: 15°, Scale: 0.7

OBJ Export; Pipe Radius: 0.005

Changing the angle for the Weave design

Rings; Sharpness: 1, Angle: 15°, Scale: 0.7, Z-Offset: 0

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.015
Rings; Sharpness: 1, Angle: 12°, Scale: 0.82

Rings; Sharpness: 1, Angle: 0°, Scale: 0.85

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.015

Rings; Sharpness: 0, Angle: 15°, Scale: 0.8

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.015
OBJ Export; Pipe Radius: 0.015

OBJ Export; Pipe Radius: 0.02

OBJ Export; Pipe Radius: 0.01

Rings; Sharpness: 1, Angle: 30°, Scale: 0.85

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.015

Rings; Sharpness: -1, Angle: 15°, Scale: 0.7

OBJ Export; Pipe Radius: 0.007

OBJ Export; Pipe Radius: 0.01

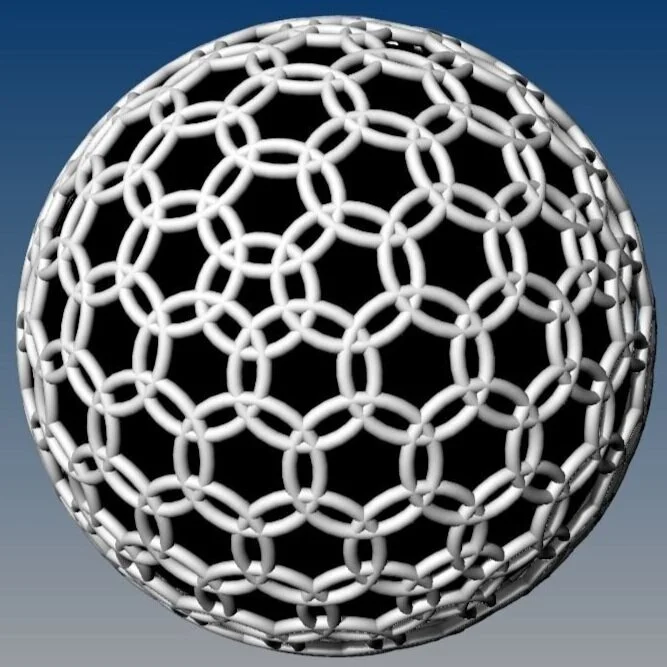
3D-Printed Geodesic Rings, White

3D-Printed Geodesic Rings, Grey

Weave

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.015

OBJ Export; Pipe Radius: 0.02

Weave; Z-Offset: 0

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.02

OBJ Export; Pipe Radius: 0.03

3D-Printed Geodesic Weave, White

3D-Printed Geodesic Weave, Purple

Braid; Z-Offset: 0.25

OBJ Export; Pipe Radius: 0.005

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.02

Braid; Z-Offset: 0

OBJ Export; Pipe Radius: 0.01

OBJ Export; Pipe Radius: 0.02

OBJ Export; Pipe Radius: 0.03

OBJ Export; Z-Offset: 0, Pipe Radius: 0.1

3D-Printed Geodesic Braids, Blue